Robot PUMA
Explicación:
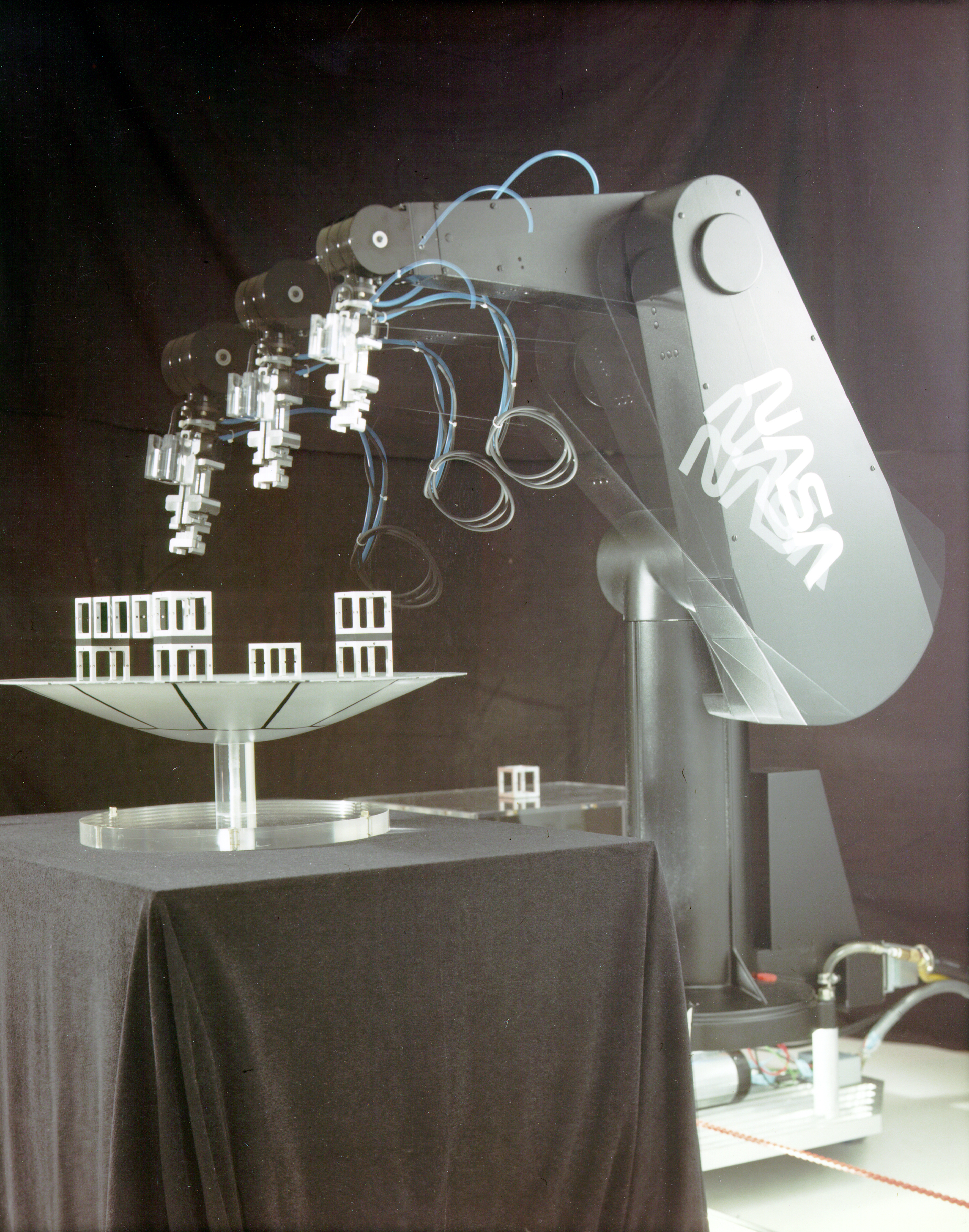
PUMA (Programmable Universal Machine for Assembly, or Programmable UniversalManipulation Arm) es un brazo robot industrial desarrollado por Victor Scheinman en la empresa pionera en robótica Unimation. Inicialmente desarrollado para General Motors, el brazo robot PUMA nació de los diseños iniciales inventados por Scheinman mientras se encontraba en el MIT y en la Stanford University.
Historia:
Unimation produjó PUMAs durante algunos años hasta que fue absorbida por Westinghouse(ca. 1980), y posteriormente por la empresa suiza Stäubli (1988). Nokia Robotics manufacturó cerca 1500 brazos robots PUMA durante los años 1980, siendo el PUMA-650 el modelo más popular entre los clientes. Nokia vendió su división de robótica en 1990.
En 2002, La organización General Motors Controls, Robotics and Welding (CRW) donó el prototipo original del brazo robot PUMA al Museo Nacional de Historia Americana, reconociéndose así su importancia en el desarrollo de la robótica.
http://es.wikipedia.org/wiki/PUMA_(robot)
Componentes del Sistema:
Control maestro alambico.
El control alambico le permite como usuario controlar el brazo del robot manipulando todas sus articulaciones en los diferentes ejes.
Los botones más utilizados para la programación de los movimientos son los siguientes:
- CLAMP1 Sirve para cerrar y abrir la pinza de la mano del robot.
- COMP Habilita el uso de la terminal.
- JOINT Habilita el movimiento libre de cada una de las articulaciones del robot.
- WORLD Habilita el movimiento del robot en una sola dirección en base a un eje constante.
- HOLD Es un candado que frena el movimiento del robot cuando ejecuta una rutina que excede los límites. Para habilitar a otro modo hay que presionar al menos este botón durante dos segundos.
- TEACH SPEED Controla la velocidad en modo manual.
- SAFETY HOLD Inhibe el movimiento del robot.
Productos:
Este robot es utilizado para ensamblar piezas de artefactos a construir, desde lo mas simple hasta lo mas complejo. Ejemplos son :
- Candados
- Cerradura de puertas
- Celulares
- Computadores
- Televisores
- Radios
- Equipos de sonidos
- Vehículos
http://www.pandeo.com/cache.asp?IDRes=4478
Productos:
Este robot es utilizado para ensamblar piezas de artefactos a construir, desde lo mas simple hasta lo mas complejo. Ejemplos son :
- Candados
- Cerradura de puertas
- Celulares
- Computadores
- Televisores
- Radios
- Equipos de sonidos
- Vehículos
http://www.pandeo.com/cache.asp?IDRes=4478
http://upload.wikimedia.org/wikipedia/commons/7/7f/Puma_Robotic_Arm_-_GPN-2000-001817.jpg
Es un excelente prototipo de nano-tecnologia, careces un poco de información acerca del tema, pero tienes lo básico y es lo importante.
ResponderEliminarla verdad que escogiste un robot indispensable para la tecnologia de fabricación, falta un poco de información pero esta muy bien el trabajo.
ResponderEliminarQue gran trabajo! me parece que es muy importante este tema, es necesario informarnos sobre el tema
ResponderEliminarEs un tema interesante sobre robótica, el video no me enseña lo que verdaderamente puede llegar a realizar este prototipo, pero con la información basta
ResponderEliminarCreo que con este material se puede trabajar, visite las páginas y resume todo de manera clara y concisa ¡ BUEN TRABAJO!
ResponderEliminar